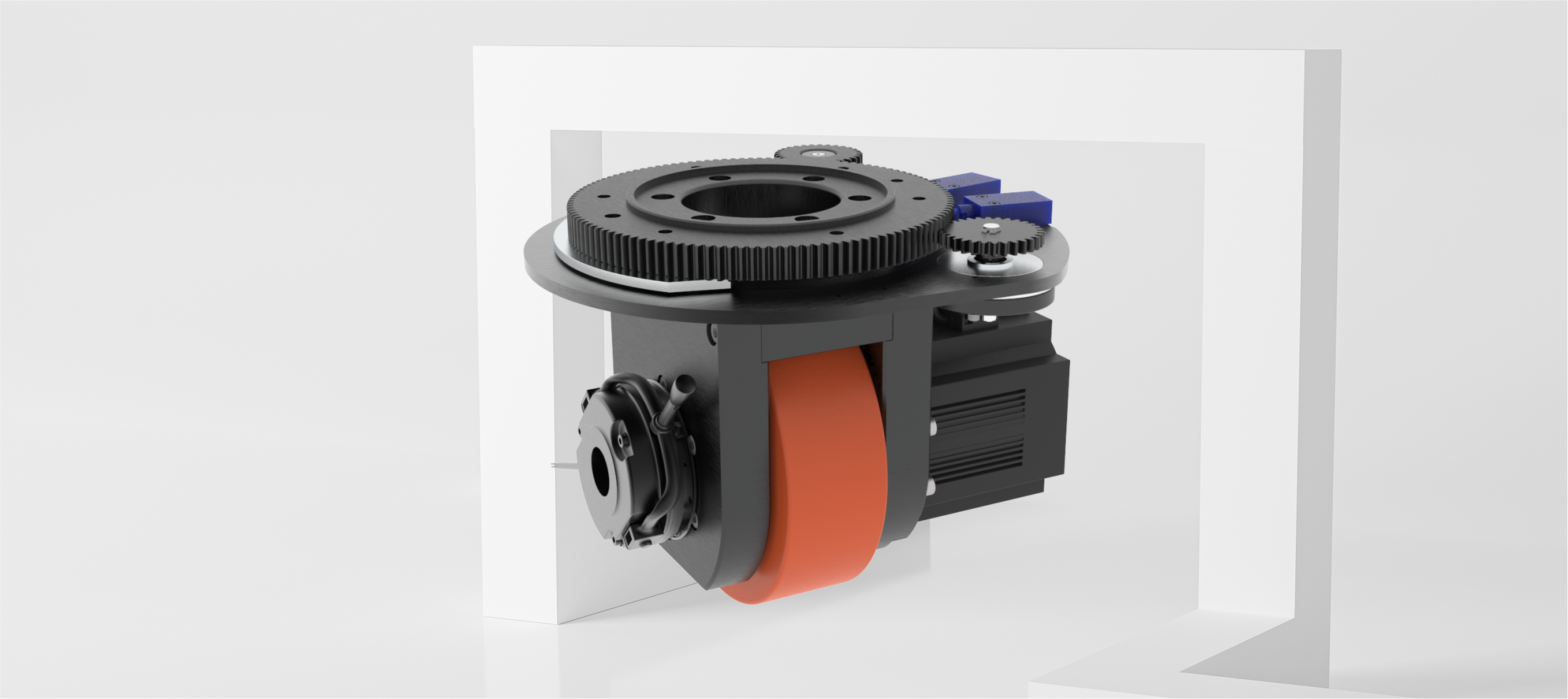
Descripción técnica del volante AGV
Un volante AGV es un componente de movimiento clave en los sistemas de chasis AGV y AMR, responsable de la conducción, la dirección y la rotación del pivote.
Su diseño y configuración tienen un impacto directo en la maniobrabilidad, la precisión de posicionamiento, la capacidad de carga útil y la estabilidad operativa .
En la automatización de almacenes y la fabricación inteligente, los volantes se utilizan ampliamente para construir plataformas AGV flexibles y confiables.
Características técnicas clave
-
Conducción y dirección integradas mediante servomotores
-
Radio de giro estrecho y rotación de radio cero
-
Amplia adaptabilidad de carga útil para diferentes tamaños de vehículos
-
Diseño mecánico modular para una disposición flexible del chasis
-
Múltiples opciones de frenado y retroalimentación para un funcionamiento seguro
Especificaciones técnicas típicas
| Artículo | Rango típico | Descripción |
|---|---|---|
| Capacidad de carga | 100 kg – 10 toneladas | Calculado en base al peso total del vehículo |
| Motor de accionamiento | Servomotor | Control estable de velocidad y par |
| Motor de dirección | Servomotor | Ángulo de dirección arbitrario |
| Diámetro de la rueda | 150 – 400 milímetros | Afecta la estabilidad y el contacto con el suelo. |
| Velocidad nominal | 0,5 – 2,0 m/s | Depende de la aplicación |
| Tipo de freno | Electromagnético / Mecánico | Configuración opcional |
| Codificador | Incremental / Absoluto | Retroalimentación de velocidad y posición |
| Montaje | Dividido / Integrado | Adaptable al diseño del chasis |
Configuraciones comunes del volante de AGV
Volante simple con ruedas de apoyo
Esta disposición se utiliza comúnmente en AGV de carga ligera y AMR compactos. El volante integra las funciones de conducción y dirección, mientras que las ruedas pasivas proporcionan estabilidad y soporte de carga.
Ofrece una estructura mecánica sencilla y un control directo, adecuado para tareas de transporte de almacén estandarizadas.
Configuración de tracción en las cuatro ruedas
Los sistemas de volante doble se aplican ampliamente en AGV de carga media donde se requiere mayor estabilidad y precisión de posicionamiento.
Al sincronizar dos volantes servoaccionados, el vehículo logra un movimiento más suave, una mejor distribución de la carga y una repetibilidad confiable durante la operación.
Sistema de dirección omnidireccional en las cuatro ruedas
Los diseños de dirección en las cuatro ruedas permiten que cada rueda se conduzca y dirija de forma independiente, lo que permite el movimiento lateral, el desplazamiento diagonal y la rotación en el lugar.
Esta configuración se utiliza normalmente en AMR avanzados y entornos con limitaciones de espacio que requieren alta maniobrabilidad y planificación de ruta flexible.
La configuración final debe seleccionarse en función de la carga útil, el espacio disponible y los requisitos de control.
Áreas de aplicación típicas
-
Automatización de almacenes y logística
-
Líneas de fabricación y montaje
-
Instalaciones de semiconductores y electrónica
-
Robots médicos y de logística interna
-
AGV para manipulación de materiales de servicio pesado
Directrices de selección
A la hora de seleccionar un volante AGV, los factores clave incluyen:
-
Peso total del vehículo y carga útil
-
Velocidad requerida y precisión de posicionamiento
-
Requisitos del tipo de movimiento
-
Estado del suelo y ciclo de trabajo
-
Compatibilidad con sistemas de servoaccionamiento
La selección adecuada mejora la confiabilidad del sistema y el rendimiento a largo plazo.
Conclusión
El volante de un AGV es un componente de misión crítica más que una pieza estandarizada.
La estructura y los parámetros bien combinados mejoran significativamente la flexibilidad, la eficiencia y la estabilidad operativa del AGV.
Compartir:
Por qué no se puede utilizar un freno de retención de motor como freno dinámico en sistemas de accionamiento AGV/AMR
Volante AGV vs. transmisión diferencial: Comparación técnica