The load capacity, steering flexibility, and running stability of an AGV are often not determined by a single motor parameter. In many cases, they depend more on the steering wheel configuration.
Take a 2-ton AGV as an example. The drive system cost between different steering wheel configurations may differ by more than two times. At the same time, the motion performance, control capability, and suitable applications can also be completely different.
Based on HKT ROBOT’s years of experience in AGV/AMR projects, this article explains five common AGV steering wheel configurations and provides selection references for different loads, site conditions, and movement requirements.

1. Five Common AGV Steering Wheel Configurations
The steering wheel configuration of an AGV directly affects load capacity, steering flexibility, control difficulty, chassis layout, and overall system cost. In real AGV/AMR projects, different configurations are suitable for different load ranges, movement paths, and application scenarios. Below are five commonly used configurations in the industry.
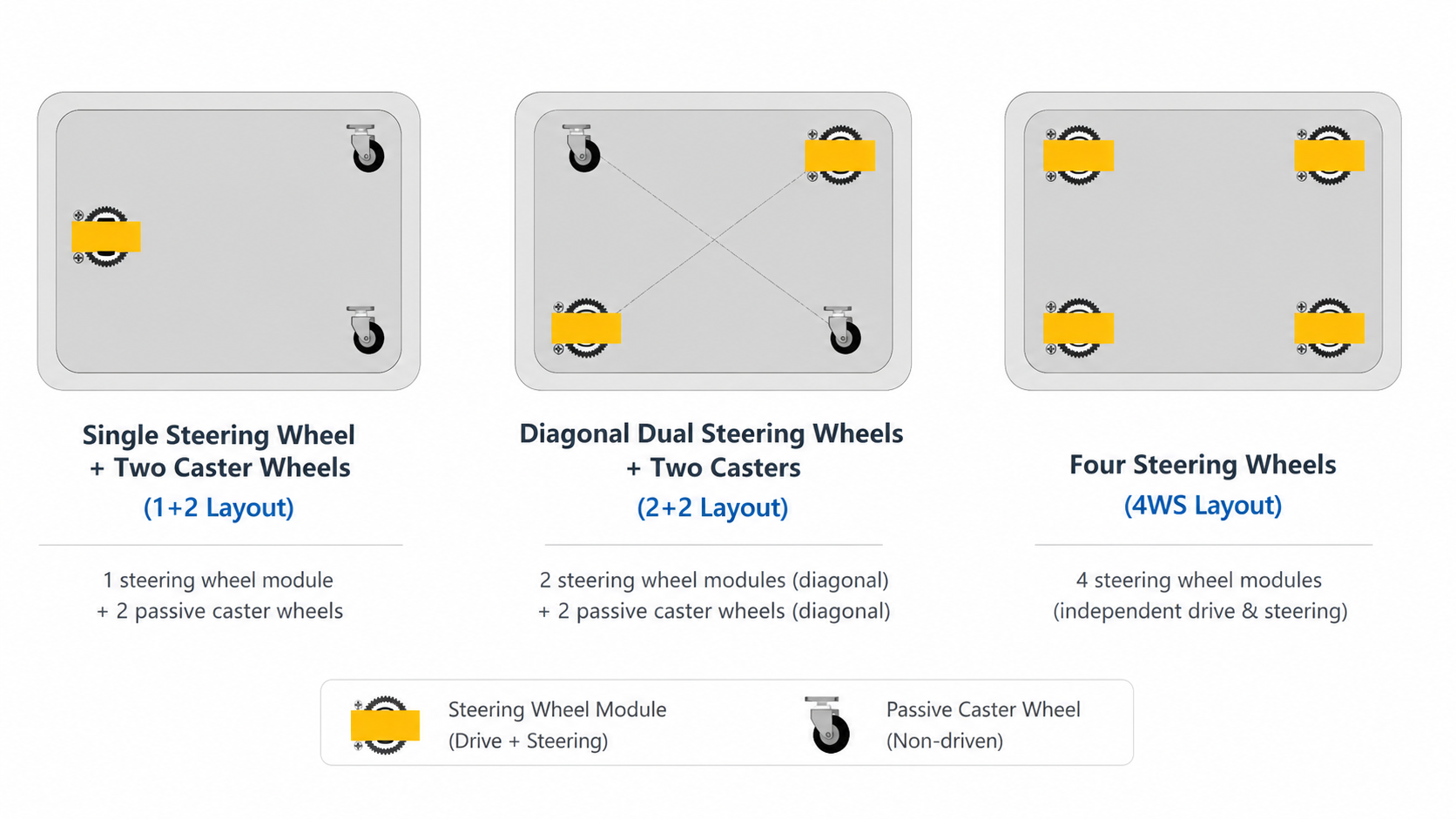
1.1 Single Steering Wheel Configuration: 1 + 2 Layout
Structure: One steering wheel module with integrated driving and steering functions, combined with two passive caster wheels.
Features:
-
Lower cost and simple structure
-
Easier installation and commissioning
-
Suitable for light-duty AGVs with relatively fixed routes
-
Limited steering flexibility
-
Not suitable for complex omnidirectional movement
-
Weak support for high-precision lateral movement or in-place posture adjustment
Typical Applications: Small material carts in 3C electronics workshops, hospital medicine delivery AGVs, light-duty warehouse picking vehicles, and simple indoor transport platforms.

1.2 Diagonal Dual Steering Wheel Configuration: 2 + 2 Layout
Structure: Two steering wheel modules are installed at opposite diagonal positions of the chassis, together with two passive caster wheels.
Features:
-
Higher movement flexibility, supporting forward/backward movement, lateral movement, and rotation
-
Commonly used for medium-duty to medium-heavy-duty AGVs around 1–3 tons
-
Better steering and posture adjustment capability than a single steering wheel layout
-
Requires coordinated control of two steering wheel modules
-
Higher requirements for control algorithms and commissioning
-
Higher cost than the 1 + 2 layout, but lower than the four-wheel steering layout
Typical Applications: E-commerce sorting centers, automotive parts handling, pharmaceutical logistics, warehouse transfer robots, and medium-heavy-duty indoor AGV platforms.

1.3 Centerline Dual Steering Wheel Configuration: Front and Rear Layout
Structure: Two steering wheel modules are installed along the longitudinal centerline of the vehicle, usually at the front and rear. Four passive caster wheels are often placed at the chassis corners for support.
Features:
-
Stable center of gravity, suitable for long and narrow vehicle bodies
-
Good for long-distance straight-line movement and narrow-aisle turning
-
Fast steering response for long-body AGV platforms
-
More suitable for applications where the load is distributed along the length of the vehicle
-
Compared with the diagonal dual steering wheel layout, lateral movement accuracy and omnidirectional flexibility may be slightly weaker
Typical Applications: Tow-type AGVs, long material handling AGVs, profile transport vehicles, battery module transport platforms, and long-frame industrial transfer equipment.

1.4 Four-Wheel Drive and Four-Wheel Steering Configuration: 4WD / 4WS Layout
Structure: Four steering wheel modules are installed at the four corners of the chassis. Each module can drive and steer independently.
Features:
-
Strongest omnidirectional movement capability
-
Can support movement in any direction, rotation, and complex path planning depending on the control system
-
Strong load capacity, suitable for heavy-duty AGV platforms
-
Four-corner layout helps improve load distribution and running stability
-
Higher system cost and higher control complexity
-
In some system designs, it can provide a certain level of redundancy for fault diagnosis and safe stopping
Typical Applications: Automotive final assembly lines, wind blade handling, aerospace component transfer, large mold transport, heavy-duty industrial platforms, and special equipment handling.
 1.5 Differential Drive + Passive Caster Wheels
1.5 Differential Drive + Passive Caster Wheels
Structure: Two fixed-direction drive wheels without steering mechanisms, combined with one or two passive caster wheels.
Features:
-
Simple structure and lower cost
-
Steering is achieved through the speed difference between the two drive wheels
-
Can rotate in place under certain conditions
-
Cannot achieve true lateral movement
-
More likely to slip on wet, dusty, or low-friction floors
-
Strictly speaking, differential drive is not a steering wheel configuration, but it is often compared with steering wheel solutions during AGV selection
Typical Applications: Restaurant delivery robots, hotel service robots, light-duty logistics carts, small indoor AMRs, and cost-sensitive mobile platforms.
2. Comparison of the Five Configurations
| Configuration | Recommended Load | Omnidirectional Movement | Zero-Turn (In-Place Rotation) | Comprehensive Cost (Reference) | Control Complexity |
| Single Steering Wheel 1+2 | ≤ 500 kg | ❌ | ❌ | ★ | ★ |
| Dual Steering Wheels (Diagonal) 2+2 | 1 - 3 tons | ✅ | ✅ | ★★★ | ★★★ |
| Dual Steering Wheels (Center-Set) | 1 - 3 tons | Partial | ✅ | ★★★ | ★★★ |
| Four Steering Wheels | 3 - 30 tons | ✅ | ✅ | ★★★★★ | ★★★★★ |
| Differential Wheel | ≤ 300 kg | ❌ | ✅ | ★ | ★★ |
In general, if the AGV has a light load, a fixed route, and a limited budget, a single steering wheel configuration can be the first option.
For flexible paths, lateral movement, or in-place rotation, a diagonal dual steering wheel is usually more suitable.
For long bodies, narrow aisles, and straight-line stability, a centerline dual steering wheel layout can be considered.
For heavy loads, high precision, or complex omnidirectional movement, a four-wheel steering configuration is a better choice.
And for simple service applications like restaurant or hotel robots, a differential drive solution is often more economical.
All in all, AGV drive and steering configuration is essentially a balance between requirements, cost, and site conditions. It is recommended to involve steering wheel, drive, and vehicle control suppliers during the early project planning stage. This can help avoid later rework caused by mismatched load capacity, steering performance, or docking accuracy.
3. HKT ROBOT’s Practice in AGV Steering Wheel Selection
Steering wheel selection should be based on the complete AGV motion system, not only on the number of wheels. Vehicle load, chassis size, movement path, floor condition, control method, and budget all affect the final configuration.
HKT ROBOT provides AGV steering wheels, differential wheel sets, servo motors, servo drives, hub reducers, and related cable assemblies. According to different platform requirements, HKT ROBOT can help evaluate single steering wheel, dual steering wheel, four-wheel steering, and customized drive solutions.
In general, light-duty AGVs with fixed routes may use single steering wheel or differential drive solutions. Medium-duty to medium-heavy-duty AGVs often use diagonal dual steering wheels. Heavy-duty platforms, long-body vehicles, or high-flexibility applications usually require four-wheel steering or customized drive solutions.
For accurate selection, customers can share the vehicle weight, payload, chassis size, speed, floor condition, aisle width, turning method, control protocol, and available installation space.
Share:
AGV Steering Wheels for Stage Automation: Smooth, Precise, and Low-Noise Moving Platforms
AGV Drive Wheels for AGV/AMR Warehouse Logistics Applications