The steering wheel of AGV (automated guided vehicle) is very important for the automated operation of logistics warehousing, especially in narrow passages or complex ground conditions, where steering accuracy is required to be high. Recently, we worked with a customer in Turkey to solve their problem of unstable steering wheel on slippery ground.
This customer's AGV system needs to move heavy goods in the warehouse, and slippery ground is a common condition. After testing, the customer found that the steering wheel was not accurate enough on slippery ground, and the AGV's motion trajectory deviated. Alpar, an engineer from a Turkish customer, said at a meeting: "We found that the AGV's steering was unstable on slippery ground, and when the trajectory deviated, it would get stuck in narrow passages, affecting work efficiency."

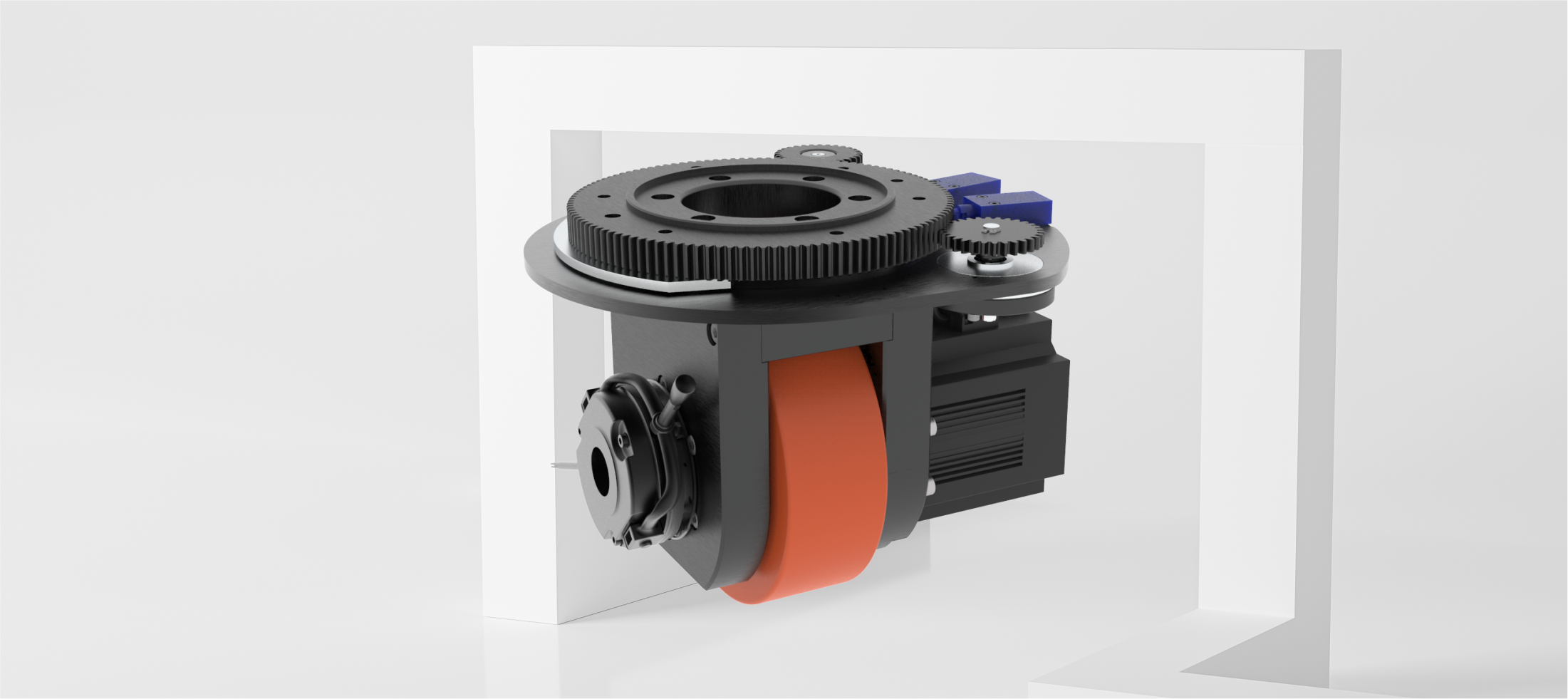
After discussing with the customer, we found that the slippery ground had insufficient friction, and the steering wheel was difficult to maintain stability when turning, especially when fully loaded with 500 kg. The core of the problem was that the control algorithm did not adapt to the changes in ground friction. The customer's concerns are very real. I asked the team: "How can the steering wheel adapt to different friction conditions in real time?" The technical director suggested adding a multi-point feedback mechanism and optimizing the control logic of the servo motor to improve the response speed.
After the improvement, we adjusted the control system of the steering wheel, recalibrated the steering parameters, and added real-time feedback. The optimized steering wheel can adjust the steering angle according to the ground friction conditions, which significantly improves the running stability on slippery ground. After testing, the steering error was reduced by 30%, and the AGV's trajectory under full load was more accurate.
After the test results were fed back, Alpa said: "The optimized steering wheel runs very stably, and the steering problem on slippery ground is completely solved. Now our AGV can run efficiently." His affirmation made us feel satisfied, and this cooperation proved the effect of technical optimization.
Through this project, we solved the customer's practical problems and improved the performance of the product under special working conditions. In the future, we will continue to optimize our products and provide customers with reliable and efficient steering wheel solutions.
Share:
Application and Selection Guide of Servo Drive in Industrial Automation
Forklift Aisle Width Calculation for Logistics Operations