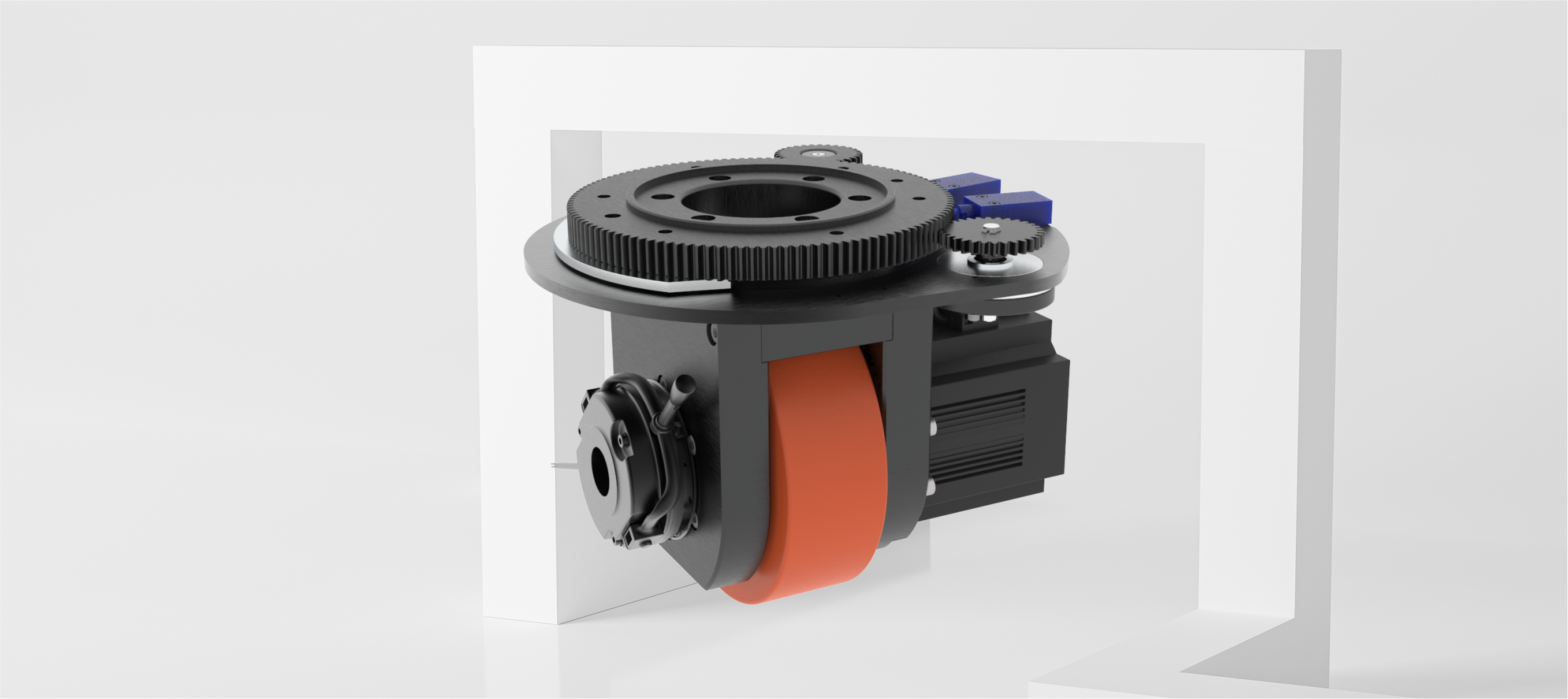
AGV Direksiyon Simidi Teknik Genel Bakış
AGV direksiyon simidi, AGV ve AMR şasi sistemlerinde sürüş, yönlendirme ve eksenel dönüşten sorumlu önemli bir hareket bileşenidir.
Tasarımı ve konfigürasyonu , manevra kabiliyetini, konumlandırma doğruluğunu, yük taşıma kapasitesini ve operasyonel istikrarı doğrudan etkiler .
Depo otomasyonu ve akıllı üretimde, esnek ve güvenilir AGV platformları oluşturmak için direksiyon sistemleri yaygın olarak kullanılmaktadır.
Başlıca Teknik Özellikler
-
Servo motorlar kullanılarak entegre sürüş ve direksiyon sistemi.
-
Dar dönüş yarıçapı ve sıfır yarıçaplı dönüş
-
Farklı araç boyutlarına uygun geniş yük taşıma kapasitesi.
-
Esnek şasi düzeni için modüler mekanik tasarım
-
Güvenli çalışma için çoklu frenleme ve geri bildirim seçenekleri
Tipik Teknik Özellikler
| Öğe | Tipik Aralık | Tanım |
|---|---|---|
| Yük Kapasitesi | 100 kg – 10 ton | Toplam araç ağırlığına göre hesaplanmıştır. |
| Tahrik Motoru | Servo motor | Sabit hız ve tork kontrolü |
| Direksiyon Motoru | Servo motor | Keyfi direksiyon açısı |
| Tekerlek Çapı | 150 – 400 mm | Dengeyi ve zeminle teması etkiler. |
| Nominal Hız | 0,5 – 2,0 m/s | Uygulamaya bağlı |
| Fren Tipi | Elektromanyetik / Mekanik | İsteğe bağlı yapılandırma |
| Kodlayıcı | Artımlı / Mutlak | Hız ve konum geri bildirimi |
| Montaj | Bölünmüş / Entegre | Şasi tasarımına uyarlanabilir |
AGV Direksiyon Simidi Konfigürasyonlarında Sık Kullanılan Yöntemler
Destek tekerlekli tek direksiyon simidi
Bu düzen genellikle hafif yük taşıyan AGV'lerde ve kompakt AMR'lerde kullanılır. Direksiyon simidi sürüş ve yönlendirme fonksiyonlarını entegre ederken, pasif tekerlekler denge ve yük desteği sağlar.
Basit bir mekanik yapıya ve kolay kontrole sahip olan bu ürün, standartlaştırılmış depo taşımacılığı görevleri için uygundur.
Çift Direksiyonlu Sürüş Yapılandırması
Çift direksiyon sistemi, daha yüksek denge ve konumlandırma doğruluğunun gerekli olduğu orta yük kapasiteli AGV'lerde yaygın olarak kullanılmaktadır.
İki servo tahrikli direksiyon tekerleğinin senkronize edilmesiyle araç, daha akıcı hareket, daha iyi yük dağılımı ve çalışma sırasında güvenilir tekrarlanabilirlik elde eder.
Dört Tekerlekten Yönlendirmeli Direksiyon Sistemi
Dört tekerlekten yönlendirme düzenekleri, her tekerleğin bağımsız olarak hareket etmesini ve yönlendirilmesini sağlayarak yanal harekete, çapraz harekete ve yerinde dönüşe olanak tanır.
Bu konfigürasyon genellikle gelişmiş AMR'lerde ve yüksek manevra kabiliyeti ve esnek rota planlaması gerektiren alan kısıtlı ortamlarda kullanılır.
Son konfigürasyon, taşıma kapasitesi, mevcut alan ve kontrol gereksinimlerine göre seçilmelidir.
Tipik Uygulama Alanları
-
Depo ve lojistik otomasyonu
-
Üretim ve montaj hatları
-
Yarı iletken ve elektronik tesisleri
-
Tıbbi ve dahili lojistik robotları
-
Ağır yük taşıma amaçlı AGV'ler
Seçim Yönergeleri
AGV direksiyon simidi seçerken dikkate alınması gereken başlıca faktörler şunlardır:
-
Toplam araç ağırlığı ve yük kapasitesi
-
Gerekli hız ve konumlandırma doğruluğu
-
Hareket türü gereksinimleri
-
Zemin durumu ve çalışma döngüsü
-
Servo sürücü sistemleriyle uyumluluk
Doğru seçim, sistem güvenilirliğini ve uzun vadeli performansını artırır.
Çözüm
AGV direksiyon simidi, standart bir parça olmaktan ziyade, görev açısından kritik öneme sahip bir bileşendir.
İyi eşleştirilmiş yapı ve parametreler, AGV'nin esnekliğini, verimliliğini ve operasyonel istikrarını önemli ölçüde artırır.
Paylaşmak:
AGV/AMR Tahrik Sistemlerinde Motor Tutma Freninin Dinamik Fren Olarak Kullanılamamasının Nedenleri
AGV Direksiyon Sistemi ile Diferansiyel Tahrik Sistemi Arasındaki Teknik Karşılaştırma